Dual G2 High-Power Motor Driver 24v18 for Arduino
- үнэ: 310,000 төг
Pololu Dual G2 High-Power Motor Driver 24v18 Shield for Arduino
Pololu item #: 2518
This shield makes it easy to control two high-power DC motors with your Arduino or Arduino-compatible board. Its twin discrete MOSFET H-bridges support a wide 6.5 V to 40 V operating range and are efficient enough to deliver a continuous 18 A without a heat sink. The drivers offer basic current sensing and current limiting functionality, and they accept ultrasonic PWM frequencies for quieter operation. The Arduino pin mappings can all be customized if the defaults are not convenient, and the motor driver control lines are broken out along the left side of the shield for general-purpose use without an Arduino.
Dimensions
| Size: | 2.56″ × 2.02″ × 0.38″1 |
|---|---|
| Weight: | 19 g1 |
General specifications
| Motor channels: | 2 |
|---|---|
| Minimum operating voltage: | 6.5 V |
| Maximum operating voltage: | 40 V2 |
| Continuous output current per channel: | 18 A3 |
| Current sense: | 0.020 V/A |
| Maximum PWM frequency: | 100 kHz |
| Minimum logic voltage: | 1.8 V |
| Maximum logic voltage: | 5 V |
| Reverse voltage protection?: | Y |
Identifying markings
| PCB dev codes: | ash06c |
|---|---|
| Other PCB markings: | 0J10697, blank white box |
Notes:
- 1 – Without included hardware.
- 2 – Absolute maximum; higher voltages can permanently destroy the motor driver. Recommended maximum is approximately 34 V, which leaves a safety margin for ripple voltage on the supply line.
- 3 – Typical results at room temperature with both channels running at 90% duty cycle.
Overview
 The G2 family of dual high-power motor driver shields features pairs of discrete MOSFET H-bridges designed to drive two large brushed DC motors. They have the form factor of an Arduino shield, so they can plug directly into an Arduino or compatible board, such as the A-Star 32U4 Prime, but they also break out all of the motor driver pins along the left side of the board to enable use as a general-purpose motor driver without an Arduino.
The G2 family of dual high-power motor driver shields features pairs of discrete MOSFET H-bridges designed to drive two large brushed DC motors. They have the form factor of an Arduino shield, so they can plug directly into an Arduino or compatible board, such as the A-Star 32U4 Prime, but they also break out all of the motor driver pins along the left side of the board to enable use as a general-purpose motor driver without an Arduino.
The minimum operating voltage for all four versions is 6.5 V. The maximum operating voltages are given in the above table; they are well above what typical Arduinos can tolerate, so the shields include an integrated 7.5 V, 1 A switching step-down regulator that can optionally be used to power whatever Arduino or Arduino-compatible board it is plugged into, enabling operation from a single power supply. This regulator can also be configured to output 5 V for applications where that would be more useful than the default 7.5 V, and the Arduino pin mappings can all be customized if the defaults are not convenient.
These dual motor drivers are also available as Raspberry Pi expansion boards. For single-channel versions in a more compact form factor, consider our High-Power Motor Drivers. For a lower-power, lower-cost alternative Arduino shield, please consider the Dual MC33926 Motor Driver Shield.
Details for item #2518
- – Operating voltage: 6.5 V to 40 V (absolute maximum; not intended for use with 36 V batteries)
- – Output current: 18 A continuous
- – Current sense output proportional to motor current (approx. 20 mV/A; only active while H-bridge is driving)
- – Active current limiting (chopping) with approximate default threshold of 50 A (can be adjusted lower)
This version, the 24v18 motor driver shield, can be distinguished from the other versions by its white PCB and the number 100 on top of the tall silver electrolytic capacitors.
Features common to all versions
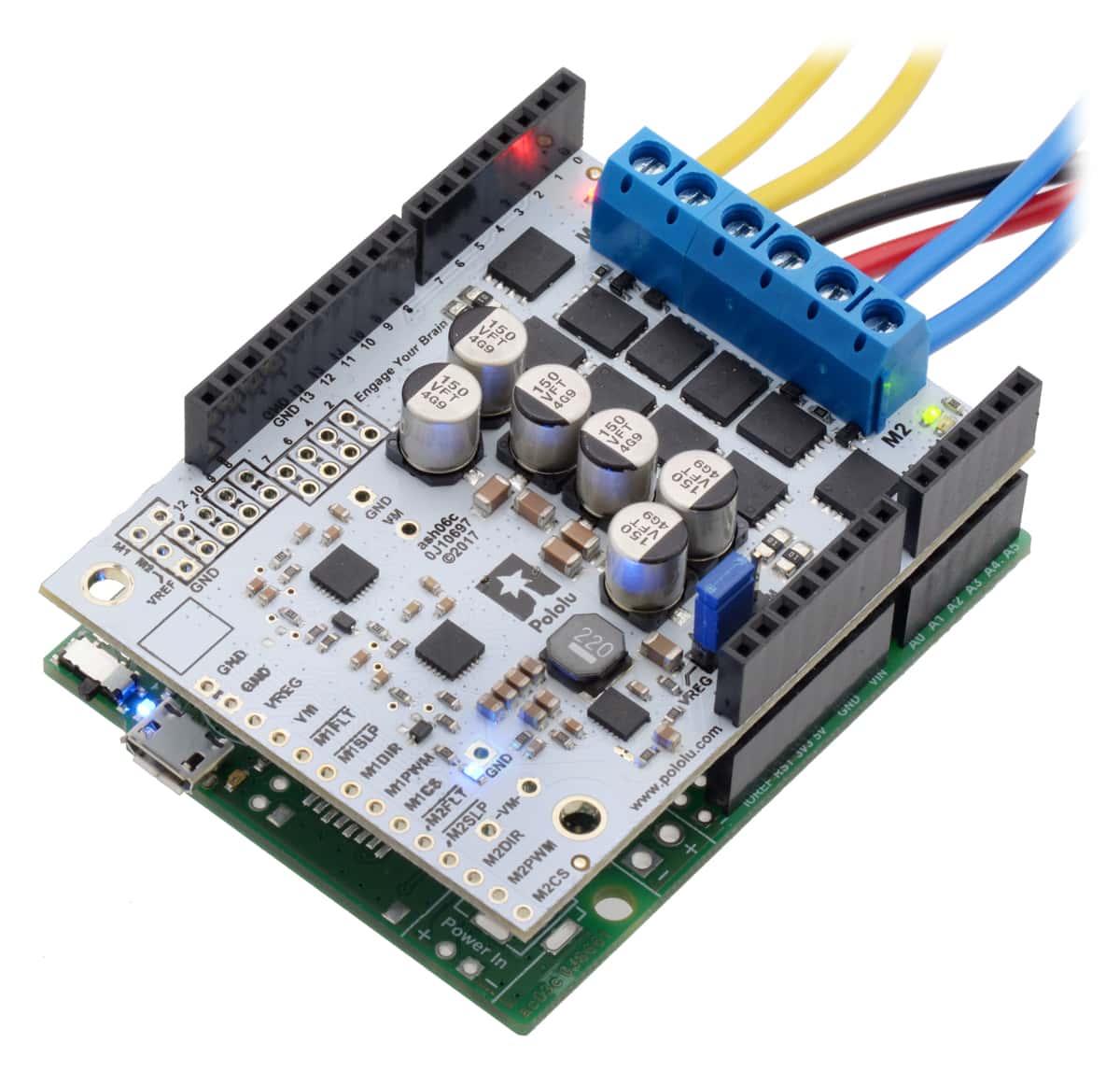
Pololu Dual G2 High-Power Motor Driver Shield being controlled by an A-Star 32U4 Prime.
- – Inputs compatible with 1.8 V, 3.3 V, and 5 V logic
- – PWM operation up to 100 kHz
- – Motor indicator LEDs show what the outputs are doing even when no motor is connected
- – Reverse-voltage protection
- – Undervoltage shutdown
- – Short circuit protection
- – Control interface allows for sign-magnitude or locked-antiphase operation
- – Integrated 7.5 V, 1 A switching step-down voltage regulator (can be set to output 5 V instead)
- – Arduino library makes it easy to get started using this board as a motor driver shield
- – Detailed user’s guide
- – Arduino pin mappings can be customized if the default mappings are not convenient
- – When used as a shield, the motor power supply or 7.5 V regulator output can optionally be used to power the Arduino base for single-supply operation
- – Can be used with an Arduino or compatible board (through shield headers) or other microcontroller boards (through 0.1″ header along the left side)
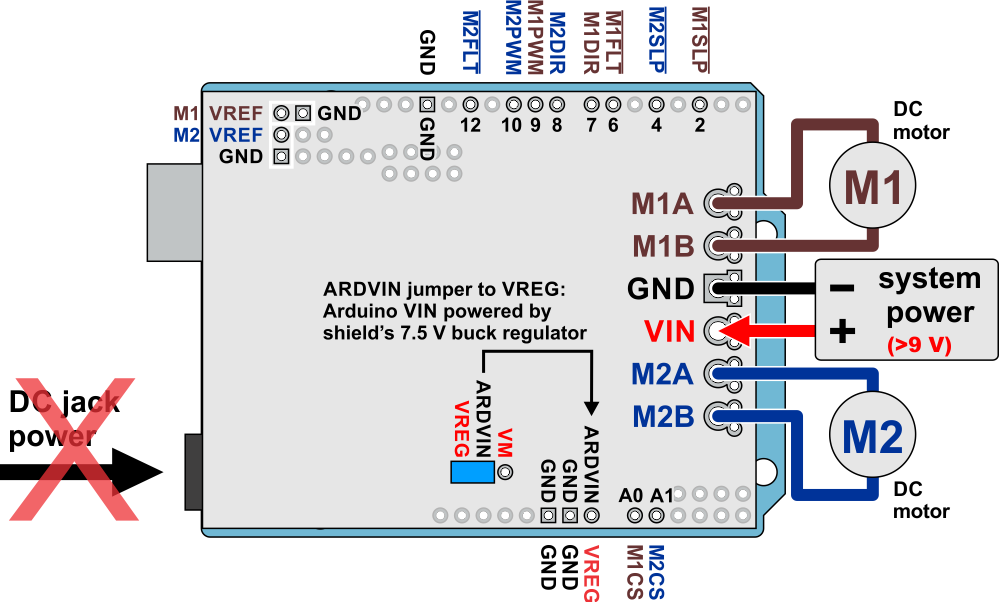
Dual G2 high-power motor driver shield powering an Arduino with the shield’s 7.5 V regulator (VREG).
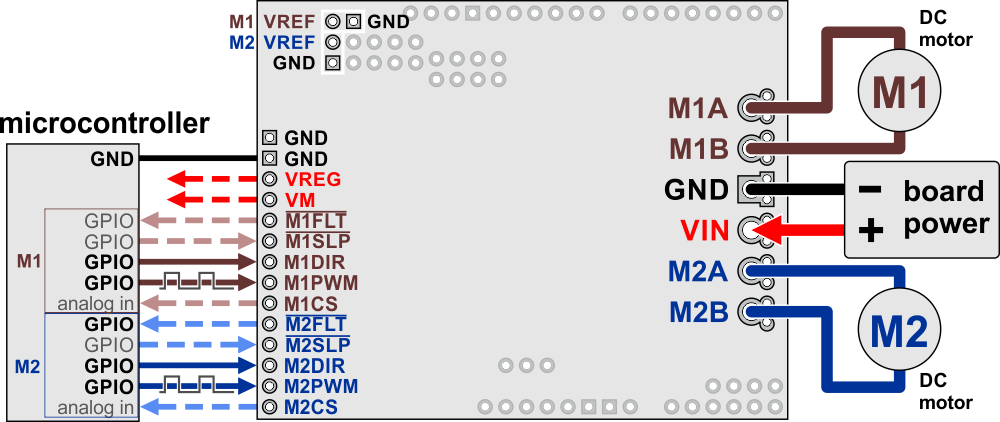
Dual G2 high-power motor driver shield connected to a microcontroller (dashed connections are optional).
Included hardware
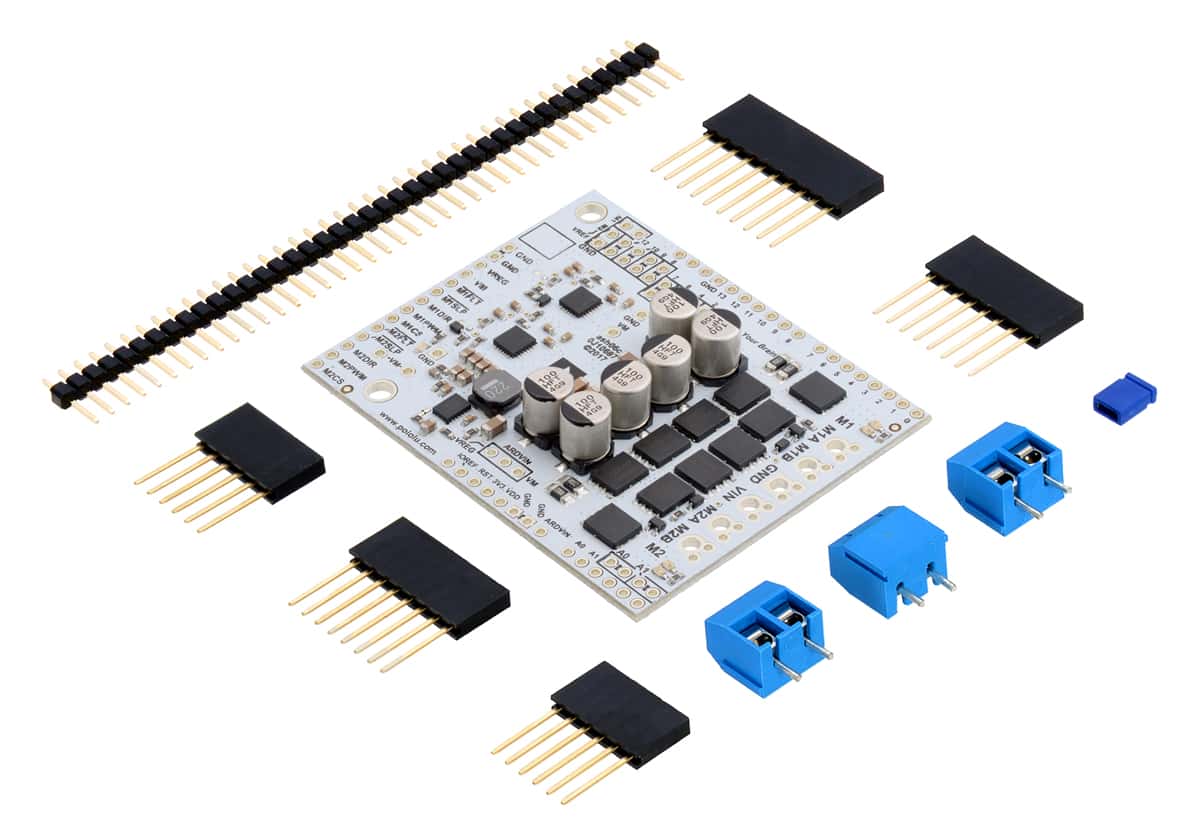
This motor driver board ships with all of the surface-mount parts populated. However, soldering is required for assembly of the included through-hole parts. The following through-hole parts are included:
- – one extended/stackable 1×10 female header (for Arduino shields)
- – two extended/stackable 1×8 female headers (for Arduino shields)
- – two extended/stackable 1×6 female headers (for Arduino shields)
- – three 2-pin 5mm terminal blocks (for board power and motor outputs)
- – 40-pin 0.1″ straight breakaway male header (may ship in several pieces, such as two 20-pin strips)
A 0.1″ shorting block (for optionally supplying shield power to Arduino) is also included.

For high-current installations, motor and power supply wires should be soldered directly to the driver (the supplied terminal blocks are only rated for up to 16 A).
You can solder the terminal blocks to the six large through-holes to make your motor and motor power connections, or you can break off a 1×12 section of the 0.1″ header strip and solder it into the smaller through-holes that border these larger holes. Note, however, that the terminal blocks are only rated for 16 A, and each header pin pair is only rated for a combined 6 A, so for higher-power applications, thick wires should be soldered directly to the board, and appropriately high-current connectors (like these) should be used.
When not using this board as an Arduino shield, you can solder the 0.1″ headers to the logic connections along the left side of the board to enable use with custom cables or solderless breadboards, or you can solder wires directly to the board for more compact installations. Note that motor and motor power connections should not be made through a breadboard.
The motor driver includes six 100 µF or 150 µF electrolytic power capacitors, and there is room to add additional capacitors (e.g. to compensate for long power wires or increase stability of the power supply). Additional power capacitors are usually not necessary, and no additional capacitors are included with this motor driver.
The two mounting holes are intended for use with #4 screws (not included).
Current sensing and limiting
The driver’s current sense pins, M1CS and M2CS, output voltages proportional to the motor currents while the H-bridge is driving. The output voltage is about 10 mV/A for the 18v22 version and 20 mV/A for the other versions, plus a small offset, which is typically about 50 mV.
The driver has the ability to limit the motor current through current chopping: once the motor drive current reaches a set threshold, the driver goes into brake mode (slow decay) for about 25 µs before applying power to drive the motor again. This makes it more practical to use the driver with a motor that might only draw a few amps while running but can draw many times that amount (tens of amps) when starting. You can lower the default current limit threshold by connecting an additional resistor between the VREF pin and the adjacent GND pin.
See the user’s guide for more information on current sense feedback and current limiting.
Real-world power dissipation consideration
The MOSFETs can handle large current spikes for short durations (e.g. 100 A for a few milliseconds), and the driver’s current chopping will keep the average current under the set limit. The peak ratings are for quick transients (e.g. when a motor is first turned on), and the continuous rating is dependent on various conditions, such as the ambient temperature. PWMing the motor will introduce additional heating proportional to the frequency. The actual current you can deliver will depend on how well you can keep the motor driver cool. The driver’s printed circuit board is designed to draw heat out of the MOSFETs, but performance can be improved by adding a heat sink or air flow. For high-current installations, the motor and power supply wires should also be soldered directly instead of going through the supplied terminal blocks, which are rated for up to 16 A.
Warning: This motor driver has no over-temperature shut-off. An over-temperature or over-current condition can cause permanent damage to the motor driver. You might consider using either the driver’s integrated current sense output or an external current sensor to monitor your current draw.
This product can get hot enough to burn under normal operating conditions. Take care when handling this product and other components connected to it.