ZeroLAG Motor Driver Single 12V-32V x 40A
- үнэ: 300,000 төг
Product Code: JS19332
Dimensions:
Size (cm): 8.1 x 8.1 x 3
Height (cm): 4
Weight (Kg): 0.05
The Most Advanced Motor Driver for Sumo Robots by JSUMO
ZeroLAG is our advanced motor driver for sumo robot projects. ZeroLAG Makes motor driving more precise and more importantly with zero delay.
Motor Driver can be controlled with any Microcontroller board like Arduino, ArduPro or Propic or mBed controllers.
Logical design for sumo robot proects. Easy to control.
Designed by robot makers for robot makers, ZeroLAG is a compact single motor driver for sumo robots. It has current compensation with MOV, TVS and RC Snubber circuit. With built-in heatsink, it can drive motors up to 40A continuous and short duration current up to 80A.
ZeroLAG is perfectly companion for sumo robots, big explorer robots, Suv Robots.
- – Operating voltage 12V-32V (3 Cell Lipo to 8 Cell Lipo)
- – Operating temp. range: -20 °C ~ + 80 °C
- – Max current 40A Continuous, 80A Burst.
- – Supports DC motors, Suitable for Maxon RE32, RE35, RE40 and DCX35L Series.
- – Supports Banebots motors up to 250 Watt.
- – 81mm Length, 46mm Width and 29mm Height.
- – Total 59 grams.
ZeroLAG Advantage vs Other Drivers
- – Suitable for hard controlling like full reverse, full forward speeds without delays.
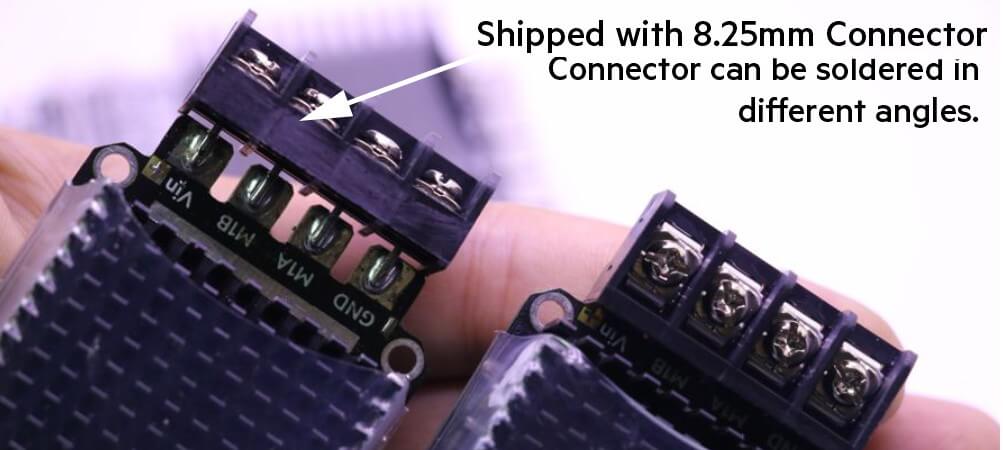
- – Designed to be easy connect and develop. At Left side you connect to controller, and at right side you connect to motor and main power supply.
- – Precision and professionalism in all stages of design, production and test.
- – An affordable price.
How you can control ZeroLAG?
How to Control ZeroLAG with Arduino?
This code gives 2 Second Forward, 1 second stop and 2 Second Backward turning routine.
| int EN=3; // Enable Pin Connected to Digital 3 int Speed=9; // Motor Speed & Direction Pin Connected to Digital 11void setup() { pinMode(EN, OUTPUT); // Enable Pin Made Output Serial.begin(9600); // Serial Iterface Started at 9600 bps baudrate. digitalWrite(EN,LOW); // Enable Pin set low for avoding false startups. delay(1500); // Delay for 1.5 Second. setPwmFrequency(9, 8); // Set Pin 9’s Pwm Frequency tp 3906 hz (3.9 Khz) } ////////// PWM Frequency Modify Function//////////////// void loop() { Serial.println(“STOPPED”); Serial.println(“FULL BACKWARD”); Serial.println(“STOPPED”); |